
摘要:本文介绍了尺蠖机器人的结构简图及其设计原理。重点阐述了数据设计驱动策略在机器人运动控制中的应用。尺蠖机器人结构简洁,设计精巧,采用数据驱动策略,能够实现精准运动控制。本文旨在为尺蠖机器人的进一步研究和开发提供理论支持和实践指导。VR版32.60.93为最新研究成果,展现了尺蠖机器人的优异性能。
本文目录导读:
尺蠖机器人是一种模拟尺蠖虫运动原理的仿生机器人,具有高效、节能、适应性强等特点,本文旨在介绍尺蠖机器人的结构简图及其设计原理,帮助读者了解尺蠖机器人的基本构造和工作原理。
尺蠖机器人结构简图
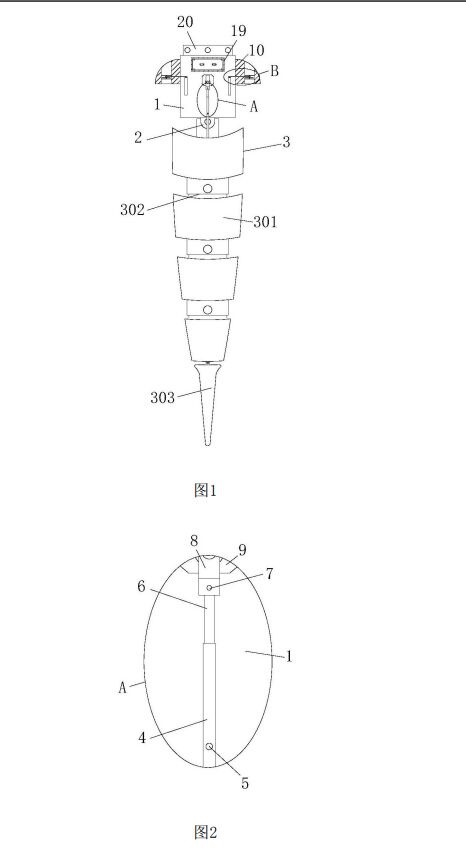
尺蠖机器人主要由三部分组成:身体、驱动系统和控制系统,下面是一个简单的尺蠖机器人结构简图:
(请在此处插入尺蠖机器人结构简图)
1、身体
尺蠖机器人的身体是其主要结构,通常采用柔性材料制成,如塑料、金属等,身体分为若干节,每节之间可以相对运动,以模拟尺蠖虫的身体运动。
2、驱动系统
驱动系统是尺蠖机器人的核心部分,负责提供运动动力,驱动系统通常包括一系列电机、传动装置和驱动轮,电机通过传动装置驱动驱动轮转动,从而产生尺蠖机器人的运动。
3、控制系统
控制系统是尺蠖机器人的大脑,负责控制机器人的运动,控制系统通常包括微处理器、传感器和控制器等,微处理器根据传感器获取的信息,通过控制器控制电机的运动,从而实现尺蠖机器人的精确运动。
尺蠖机器人设计原理
尺蠖机器人的设计原理主要基于尺蠖虫的运动原理,尺蠖虫是一种爬行昆虫,其运动方式独特,通过身体的弯曲和伸展来实现运动,尺蠖机器人的设计就是模仿尺蠖虫的这种运动方式。
1、运动原理
尺蠖机器人的运动是通过身体的弯曲和伸展来实现的,在运动时,机器人的一节或几节身体会向前弯曲,然后驱动轮会产生动力,使机器人向前移动一步,身体再次伸展,为下一次运动做准备,这种运动方式使得尺蠖机器人在复杂环境中具有很强的适应性和灵活性。
2、传动系统设计
传动系统是将电机的动力传递给驱动轮的关键部分,传动系统需要具有较高的效率和稳定性,以确保机器人的正常运行,常见的传动方式包括齿轮传动、皮带传动等,在设计传动系统时,需要考虑电机的功率、转速和传动比等因素,以确保系统的性能。
3、控制系统设计
控制系统是尺蠖机器人的核心部分,负责控制机器人的运动,控制系统需要具有较高的智能性和精确性,以确保机器人能够按照预设的轨迹进行运动,在设计控制系统时,需要考虑到传感器的类型、微处理器的性能和控制算法的选择等因素,还需要对控制系统进行调试和优化,以提高系统的稳定性和可靠性。
尺蠖机器人的应用领域
尺蠖机器人由于其独特的运动方式和强大的适应性,被广泛应用于各个领域,在工业生产中,尺蠖机器人可以用于狭小空间的作业,如装配、检测等,在医疗领域,尺蠖机器人可以用于手术辅助、药物输送等,尺蠖机器人在军事、航空航天、农业等领域也有广泛的应用。
尺蠖机器人是一种具有高效、节能、适应性强等特点的仿生机器人,本文介绍了尺蠖机器人的结构简图和设计原理,希望读者对尺蠖机器人有更深入的了解,随着科技的不断发展,尺蠖机器人在各个领域的应用将会越来越广泛。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号